New ICLR paper on input estimation
read this latest work, led by Wei Liu
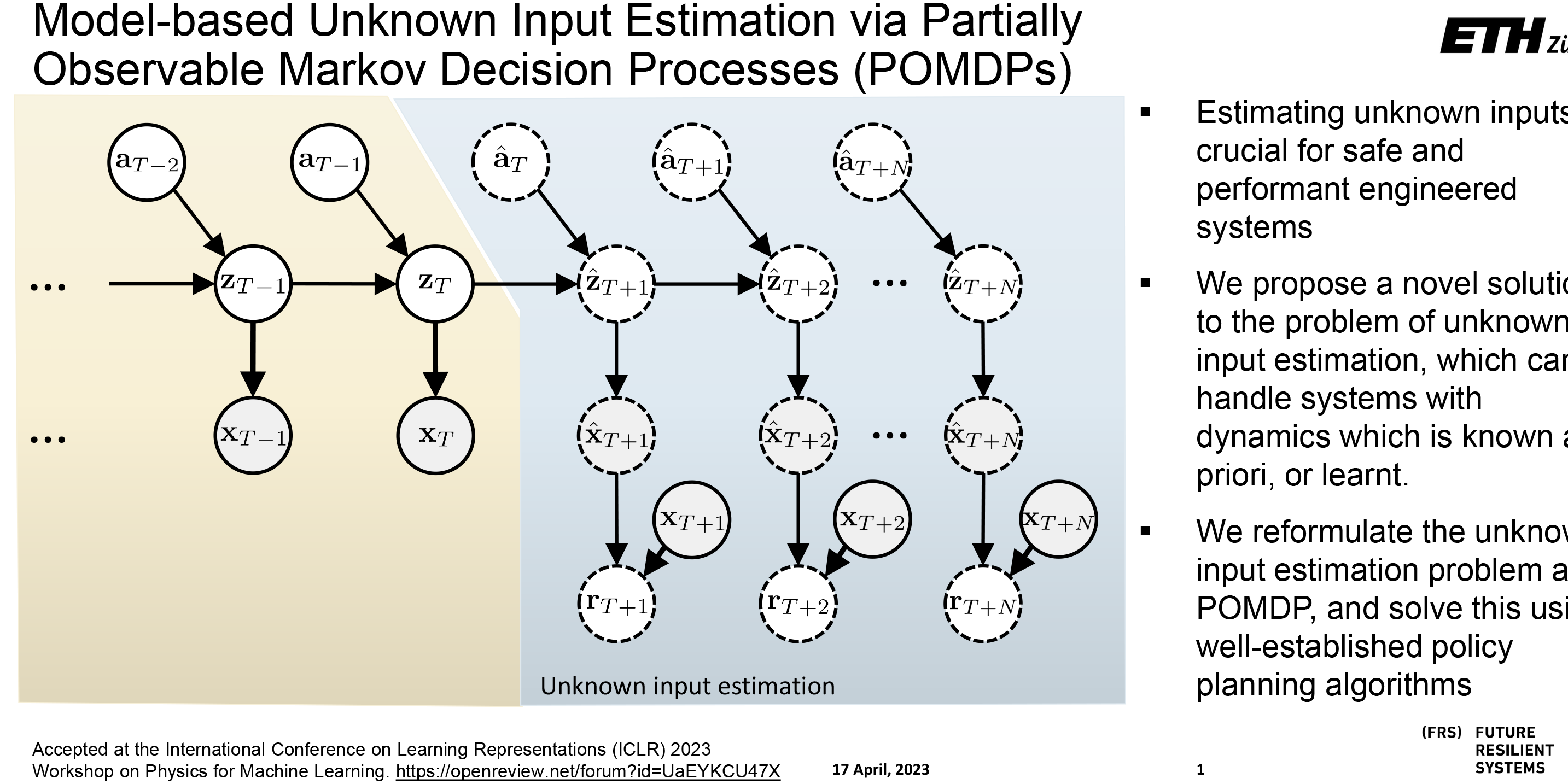
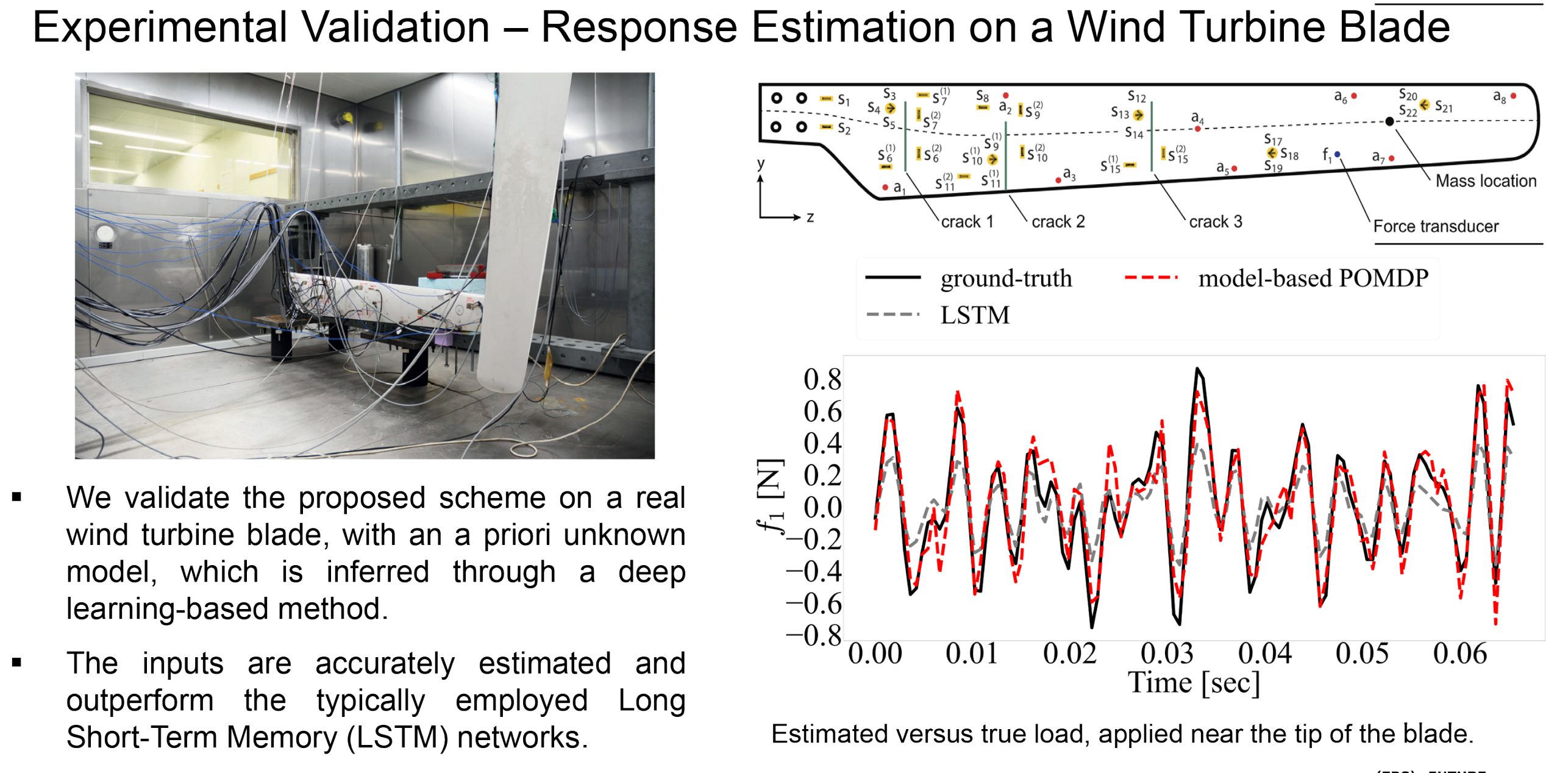
In the context of condition monitoring for structures and industrial assets, the estimation of unknown inputs, usually referring to acting loads, is of salient importance for guaranteeing safe and performant engineered systems. The assessment of performance or condition, e.g in terms of fatigue accumulation and reliability, can be evaluated more efficiently and improved under adequate estimation of the acting loads. One typical such application is input estimation for vehicles (e.g. via estimation of the road roughness profile); a use case which has found increasing use in recent years, as part of the so called on board monitoring or mobile sensing platforms. However, for real-world dynamical systems, it is difficult, if not impossible, to acquire direct measurements of acting inputs (excitation) due to the fact that these inputs are of distributed and temporally continuous nature, as well as due to the typically sparse and noisy available observations from limited sensors. This is the case, for instance, with wind loads acting on wind turbines or towering structures.
In this paper, led by Wei Liu, in collaboration with Zhilu Lai, Charikleia D. Stoura, Kiran Bacsa, and Eleni Chatzi, we explore the input estimation problem from a new perspective, which operates in an offline manner, but is flexible in admitting general (even neural network-based) representations of the system dynamics. The proposed scheme aims to furnish a high precision reconstruction of the system's input, by formulating it as a Partially Observable Markov Decision Process (POMDP), with the primary difference to a typical decision-making problem pertaining to the definition of reward/cost functions. This reformulation enables the use of state-of-the-art model-based reinforcement learning algorithms for policy search. The cross-entropy method is chosen for its efficiency and robustness. The proposed approach can handle systems whose underlying dynamics model can be known a priori or unknown, but inferred (learned). The scheme is demonstrated using simulated dynamical systems for structures with known dynamics, as well as validated on experimental data from a real wind turbine, whose dynamics is learned through a Neural Extended Kalman Filters (Neural EKF); a deep learning-based method for learning stochastic dynamics, previously proposed by the authors.
This is collaborative work between the Future Resilient Systems lab at the Singapore-ETH Centre and the SMM group. The work has been accepted at the external page International Conference on Learning Representations (ICLR) 2023 Workshop on Physics for Machine Learning.